You already know that each network consists of so-called modules. In
this chapter you will learn how a module works and how to write new
modules. Module is a class which implements
IModule interface. So let's have a look at
the UML diagram of IModule and derived
interfaces:

The following sections present a brief introduction to these interfaces. For a complete description see the OpenVIP API reference documentation.
Imagine that you prepare a network description and submit it to the core. What does the core do?
First, it asks all the modules to enumerate their input and output
connectors. This is done using the EnumConnectors
method. Here is the full prototype:
void openvip::IModule::EnumConnectors(out ConnectorDescList in_conns, out ConnectorDescList out_conns)
The module simply assembles a list of its input connectors and puts
it into in_conns; the output connectors go into
out_conns. A connector is described using a
ConnectorDesc structure:
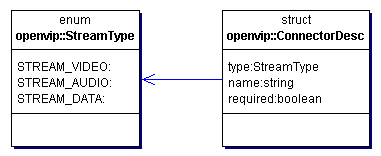
Each connector must be given a name (e.g.
audio0, video0 etc.) and a flag
whether the module requires that the connector must be linked to another
module. In addition it is necessary to specify the corresponding stream
type. Recall that OpenVIP supports three data types: video frames, audio
buffers, and data packets (see Data
types in OpenVIP). Stream type STREAM_VIDEO
then means that the corresponding connector can transport video frames,
STREAM_AUDIO transports only audio buffers, and
finally STREAM_DATA supports only data
packets.
At this moment the core is able to link the modules and check whether the supplied network is correct, i.e. whether all required connectors have a link.
Before the computation starts, all modules have to provide a more
detailed information about the data they will produce. The is done using
the SetStreams method, which has the following
prototype:
void openvip::IModule::SetStreams(in StreamInfoList in_streams, out StreamInfoList out_streams)
The module has to create the out_streams list
containing as many StreamInfo objects as there are
output connectors. The information in StreamInfo is
different for different stream types:
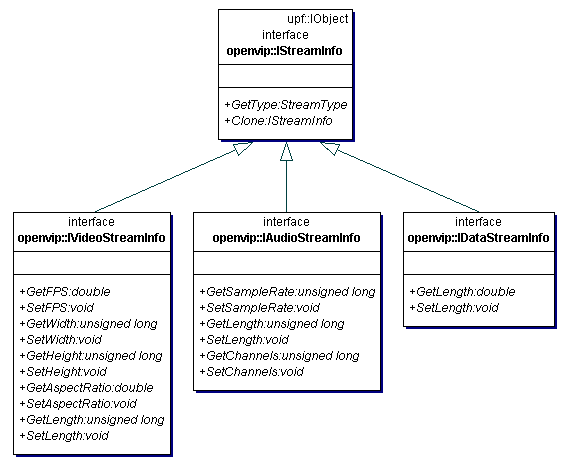
For a STREAM_VIDEO stream the module supplies a
VideoStreamInfo object with information about the
video frames it will produce including their dimensions, frame rate,
aspect ratio and the total number of frames. An
AudioStreamInfo object corresponds to a
STREAM_AUDIO stream and contains the sample rate, the
number of audio channels, and the total number of samples. A
DataStreamInfo object simply provides an
information about the length of STREAM_DATA stream in
seconds.
There arises a question now: How does a module determine its output
stream parameters if they depend on the data it will get from its input
connectors? E.g. a simple video filter such as Flip
produces video frames which are exactly of the same type as the input
video frames. The answer is that the core first asks the module which
precedes our video filter in the network about the data it will produce
(using SetStreams() again) and then supplies this
information to our video filter using the
in_streams parameter of the
SetStreams() method. This means that the input
parameter in_params contains one
StreamInfo object for each input connector. Our
video filter then simply copies the frame width, height etc. to one of
StreamInfo objects in the
out_streams list.
This procedure always gives sense - since networks cannot contain
cycles, there is always a module which doesn't have any input connectors
(these are usually the input modules which read data from files). The core
first calls SetStreams() on this module, then on
its successor etc.
At this time we collected information about all modules in the network and the computation can begin. It is driven by a scheduling algorithm, which decides what to compute at the moment (see Internals of Network Processing). The scheduler asks the modules to produce particular pieces of data.
Imagine we have a simple video filter module which reads a video
frame from input stream, performs some operation on it and passes it to
the output stream. Assume that the core asks our module to produce
videoframe number N. The module now sends a reply to
the core that in order to produce this frame it needs frame
N from the preceding module in network.
In general it could have required more input frames to produce a single output frame (consider a motion blur module which blends successive frames together). The communication between the core and the module about their requirements proceeds using the method
void QueryRequirements(in RequestList requests, out RequestList requirements);
Its input and output parameters are lists of Request structures:
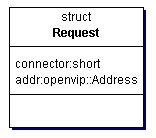
A request simply identifies the connector number (it is always an
output connector in case of requests parameter and
always an input connector in case of requirements
parameter) and the piece of data required (see Data types in OpenVIP for an overview
of address types).
The core calls module's QueryRequirements
method to ask it about the data required to fulfill its requests. The
module read the requests list, creates the
requirements list and returns it to the core. Now
it is the core's task to obtain the data specified in
requirements. It usually generates a request to the
preceding module etc. Note that each network must contain a module with no
input connectors; such module usually reads data from a file and therefore
has no further requirements.
Finally, after the core obtained the data specified in requirements, it supplies them to the module using the method
void Process(in RequestList requests, in DataFragmentList inputs, out DataFragmentList outputs)
The requests parameter has the same meaning
as in QueryRequirements. The
inputs list now contains the data the module asked
for. After the module processed them, it returns the output in the
outputs list.
Let's practice the theory from the previous section by a designing a
simple module, which would perform a decomposition of video frames into R,
G, B channels. The code presented here is a simplified version of the
RGBDecompose module from OpenVIP
distribution.
We start with the class declaration:
class RGBDecompose : public IModule
{
public:
void EnumConnectors(ConnectorDescList& in_conns, ConnectorDescList& out_conns);
void SetStreams(const StreamInfoList& in_streams, StreamInfoList& out_streams);
void QueryRequirements(const RequestList& requests, RequestList& requirements);
void Process(const RequestList& requests, const DataFragmentList& inputs, DataFragmentList& outputs);
UPF_DECLARE_CLASS(RGBDecompose)
};
UPF_IMPLEMENT_CLASS(RGBDecompose)
{
UPF_INTERFACE(IModule)
}As you can see, it is sufficient to implement only the four methods
from the IModule interface. The UPF library
learns about the existence of our class through the
UPF_DECLARE_CLASS and
UPF_IMPLEMENT_CLASS statements. We usually want to
build the code in form of a dynamic library and therefore we use the
statement
UPF_DLL_MODULE()
{
UPF_EXPORTED_CLASS(RGBDecompose)
}All we have to do now is to write the code for the four methods. The
EnumConnectors method will look like this:
void RGBDecompose::EnumConnectors(ConnectorDescList& in_conns, ConnectorDescList& out_conns)
{
in_conns.push_back(ConnectorDesc(STREAM_VIDEO, "video0", true));
out_conns.push_back(ConnectorDesc(STREAM_VIDEO, "video_r", false));
out_conns.push_back(ConnectorDesc(STREAM_VIDEO, "video_g", false));
out_conns.push_back(ConnectorDesc(STREAM_VIDEO, "video_b", false));
}The code says that our module has an input connector called
video0 of type STREAM_VIDEO -
this is the stream for reading input video frames. There are also three
output connectors called video_r,
video_g, video_b of type
STREAM_VIDEO. The images corresponding to R, G, B
channels of input frames will go there.
The SetStreams method is simple,
too:
void RGBDecompose::SetStreams(const StreamInfoList& in_streams, StreamInfoList& out_streams)
{
Ptr<IStreamInfo> info = in_streams[0];
out_streams.push_back(info);
out_streams.push_back(info);
out_streams.push_back(info);
}Recall that the SetStreams method is
responsible of setting the output video streams' width, height, aspect
ratio etc. However, our module won't change any of these properties and it
is therefore sufficient to set the output streams to match the input
stream exactly.
Here comes the QueryRequirements
method:
void RGBDecompose::QueryRequirements(const RequestList& requests, RequestList& requirements)
{
for (RequestList::const_iterator i = requests.begin(); i != requests.end(); i++)
{
Request r(*i);
r.connector = 0;
requirements.push_back(r);
}
}The core can ask for a video frame with number
N from any of the three output streams. The code
above says that to fulfill this request the module first needs to get the
frame with number N from its input stream.
The actual RGB decomposition is done in the
Process method:
void RGBDecompose::Process(const RequestList& requests, const DataFragmentList& inputs, DataFragmentList& outputs)
{
Ptr<IVideoFrame> in(inputs[0]);
Ptr<IVideoFrame> out;
unsigned w = in->GetWidth();
unsigned h = in->GetHeight();
const pixel_t *in_data = in->GetData(FORMAT_RGB24);
for (RequestList::const_iterator i = requests.begin(); i != requests.end(); i++)
{
out = upf::create<IVideoFrame>();
out->Create(w, h, FORMAT_RGB24);
switch (i->connector)
{
case 0:
copy_channel_R(in_data + 0, out->GetWData(FORMAT_RGB24), w * h);
break;
case 1:
copy_channel_G(in_data + 1, out->GetWData(FORMAT_RGB24), w * h);
break;
case 2:
copy_channel_B(in_data + 2, out->GetWData(FORMAT_RGB24), w * h);
break;
}
outputs.push_back((IDataFragment*)out);
}
}First we ask the input video frame instance to get the image data in
RGB24 format. Then we create a new video frame with the same dimensions
and copy the requested channel into it. The
copy_channel methods could look like this:
void copy_channel_R(const pixel_t *in, pixel_t *out, size_t len)
{
for (size_t i = len; i > 0; i--, in += 3, out += 3)
{
out[0] = *in;
out[1] = 0;
out[2] = 0;
}
}(Similarly for copy_channel_G and
copy_channel_B).
That's all - just compile the new code and you will be able to use
RGBDecompose in a network.
You might have noticed that the scheme described in previous
sections doesn't work well with terminal modules, i.e. modules with no
output connectors (recall that QueryRequirements
contains requests on output connectors). Imagine a terminal module which
saves audio and video data to a file; how does the core tell the module to
save a group of frames or a block of audio? The answer is that it doesn't.
It is reasonable to suppose that the output module knows better the order
in which data should be written (note that different output formats may
employ different interleaving schemes).
The whole thing with terminal modules is solved using the idea of
computation steps. Terminal module classes have to
implement the ITerminalModule interface,
which is derived from IModule and in
addition contains the method
unsigned long GetCompStepCount();
A computation step corresponds to a logical unit of output data. The module is free to interpret computation step any way it wishes. For video output module, it may be equal to frame number; audio and video output may interpret it as e.g. 1 second (so that it can easily interleave audio and video data).
Before the whole network processing starts, each terminal module has
to decide about the number of computation steps it needs to perform. The
core then calls QueryRequirements and
Process using the
ADDR_COMP_STEPS addressing scheme (see Data types in OpenVIP) repeatedly with
computation step number equal to
0,1,2,...,GetCompStepCount()-1.
It is possible that a module is not able to compute its outputs in a
single pass; it might e.g. first want to scan the whole input stream
before it decides what to do. Such modules have to implement the
IMultiPassModule interface (see the UML
diagram at the beginning of the chapter).
Before the computation starts, each multipass module is asked for
the number of passes using the GetPasses method;
let us denote this number N. Since the module doesn't
produce any output during the passes 1, ..., N-1, it
always behaves as a terminal module, which means that the core calls its
QueryRequirements and
Process methods using the computation scheme (see
the previous section). Each of the passes 1, ..., N-1
may consist of a different number of computation steps.
After one pass finished, the core calls the
NextPass method and continues with the next pass.
A multipass module may be terminal in the last pass (e.g. a multipass
output module), but is not required to (e.g. a multipass audio filter) -
its GetCompStepCount() then returns 0 in the last
pass.
You may object that the whole thing with multipass modules seems
weird - if a module first needs to scan all video frames from a file, why
doesn't it use the ordinary module's
QueryRequirements method with requirements for
all frames? This would do the trick for files with only few video frames.
However, it is impossible to ask for hundreds or thousands of frames at
once. A well-behaved module never requires extraordinary large amount of
data and uses the multipass mechanism instead.